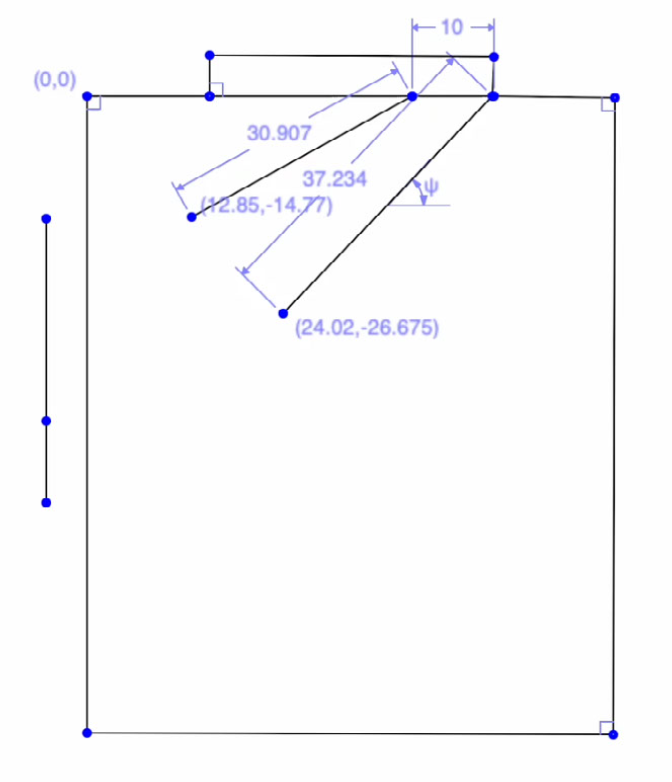
Made a 4-bar linkage assembly in SolidWorks given the bars and conducted motion analysis.
Four Bar Linkage
Made a 4-bar linkage assembly in SolidWorks given the bars and conducted motion analysis.
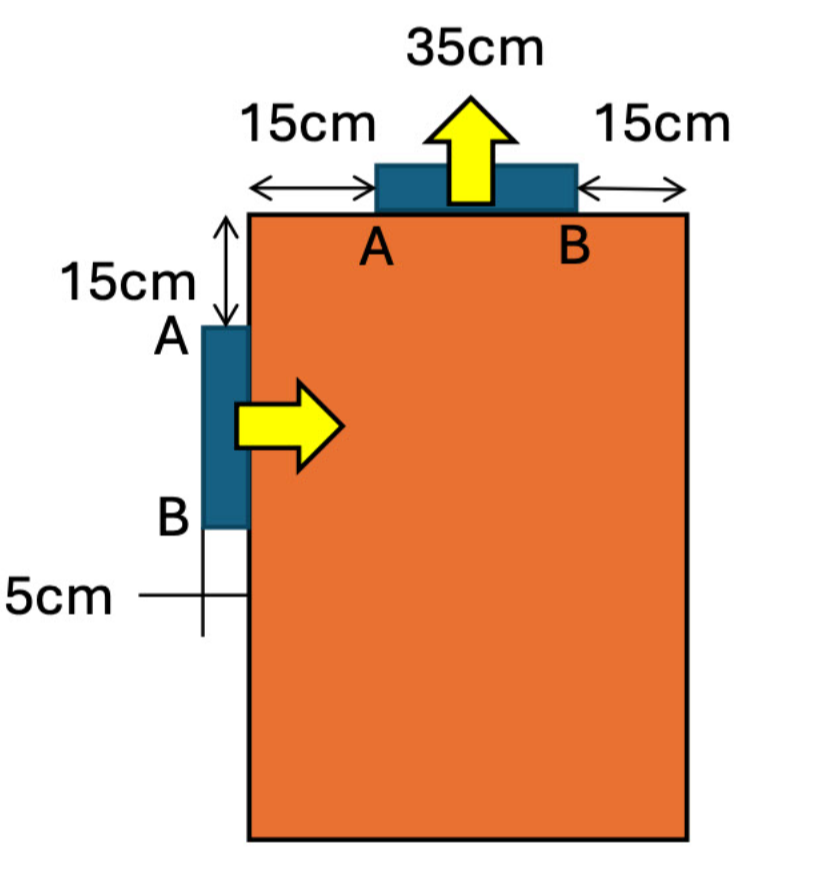
Design a linkage that moves the tray in the desired way, without traversing the container. Pivot points should be on the sides of the container, no extensions.
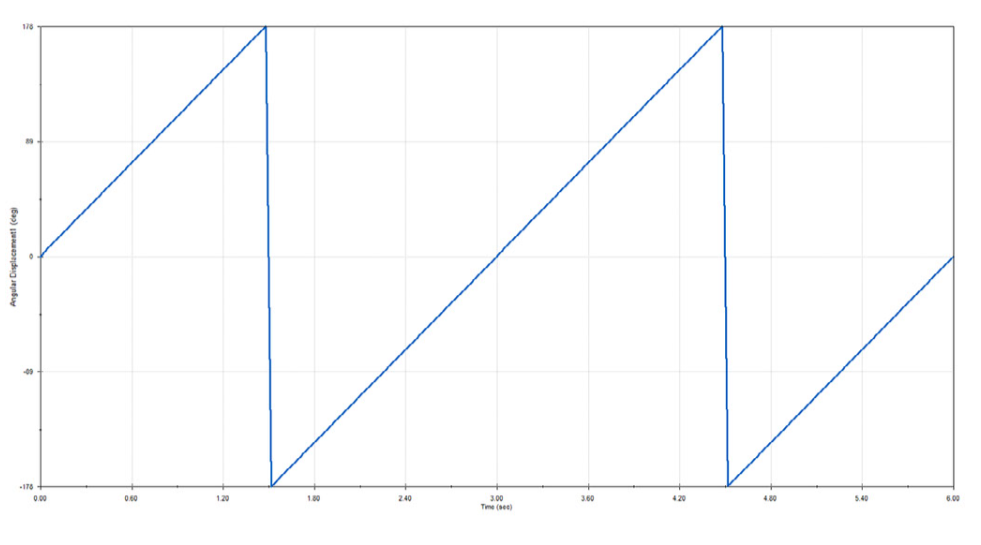
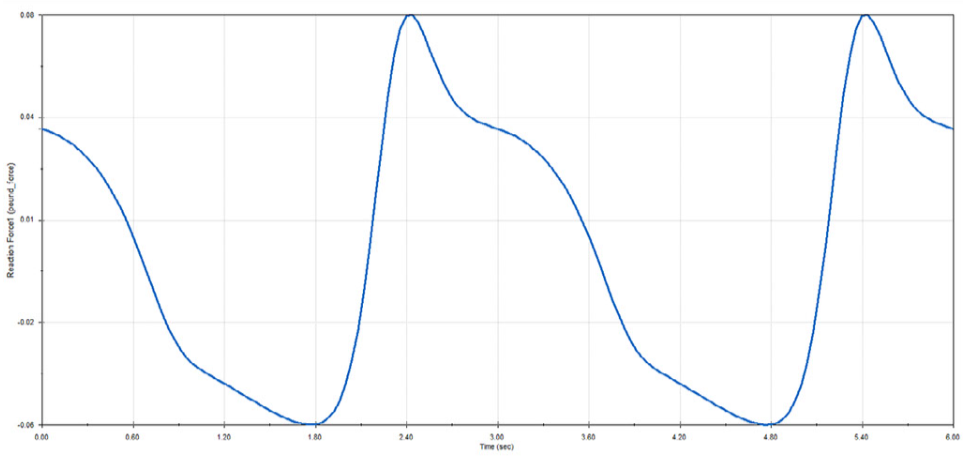
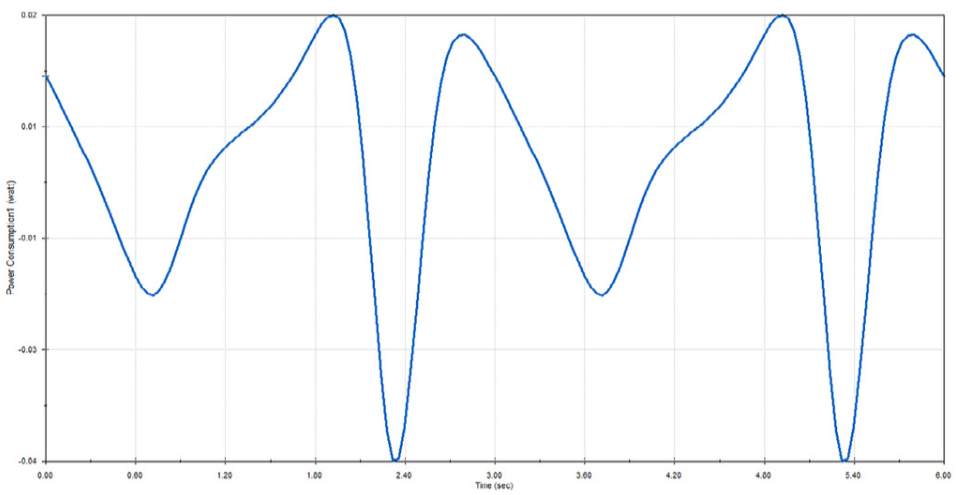
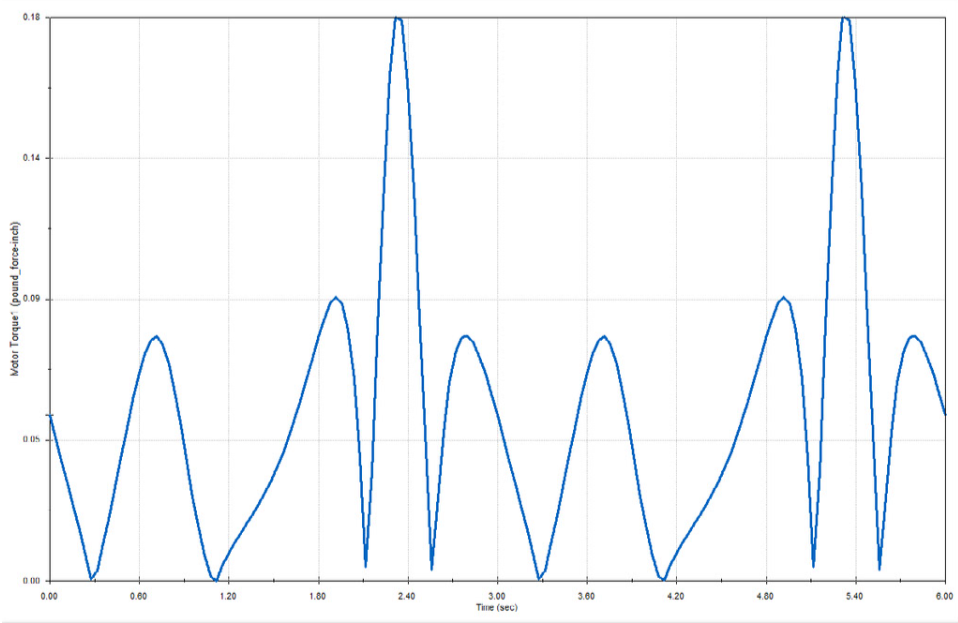
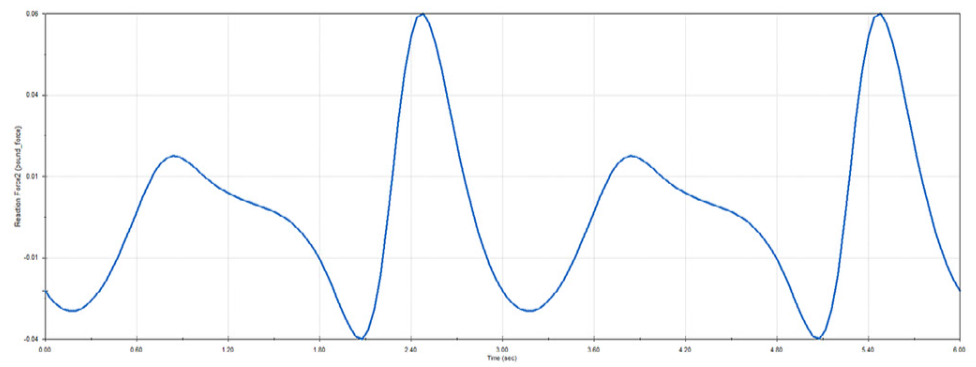
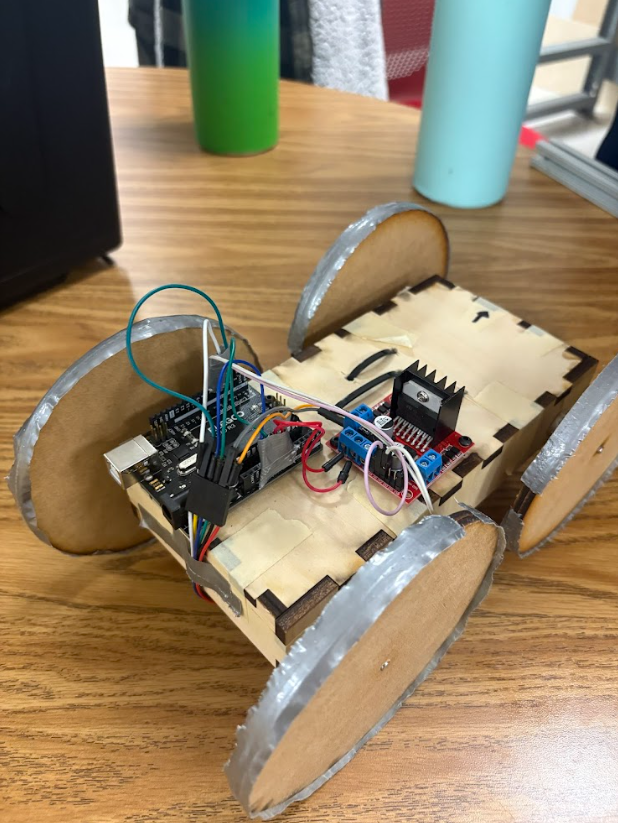
This project focused on designing and validating a motor-driven system capable of rapidly transporting a 1-foot vertical prismatic bar across a 5–10 ft distance and back without toppling. The work combined multibody dynamic simulation in SolidWorks with stability analysis to determine minimum safe transport time and guide design decisions. A physical prototype was then built using an Arduino-controlled 12V gear motor system, with emphasis on wheel sizing, control strategy, and mechanical stability under dynamic motion.
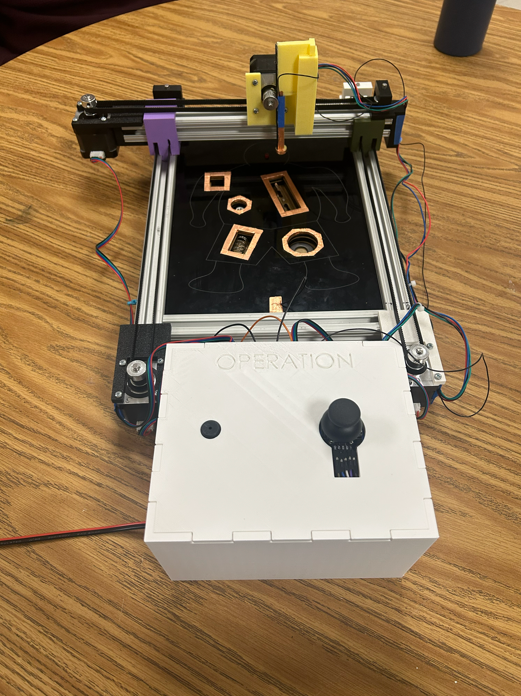
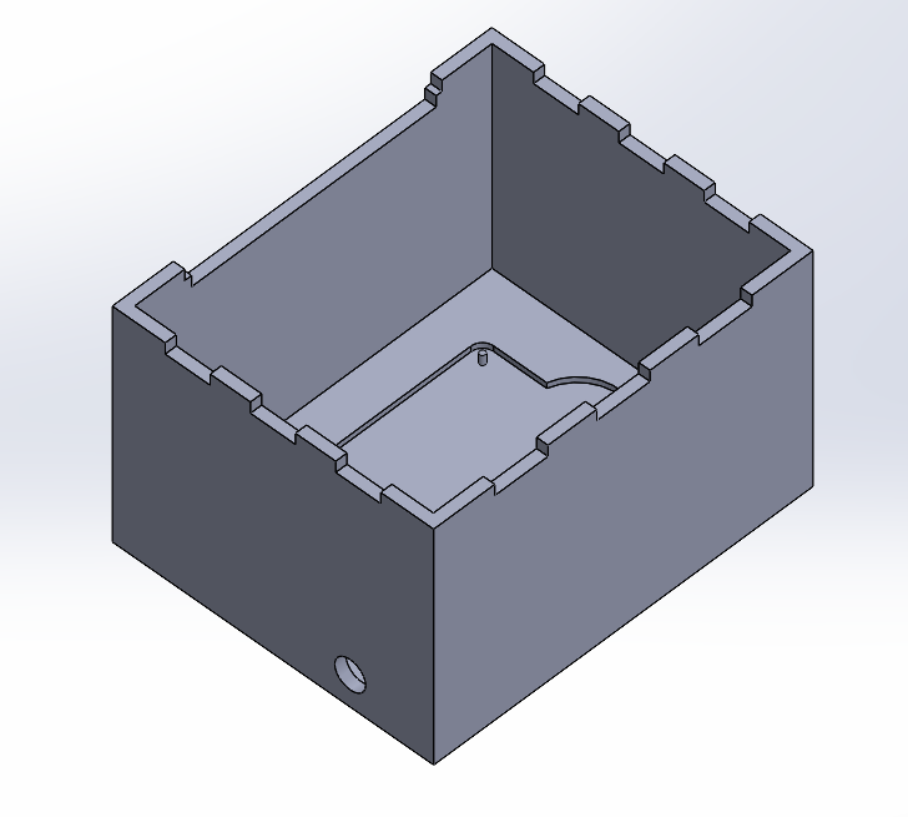
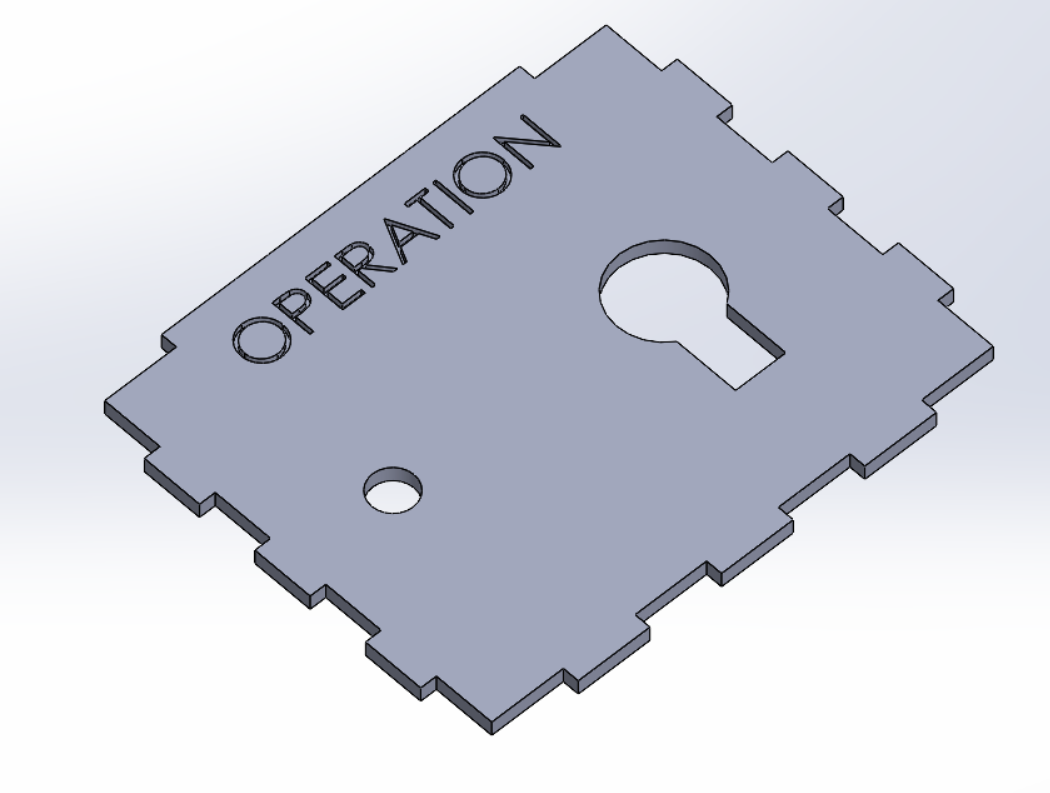
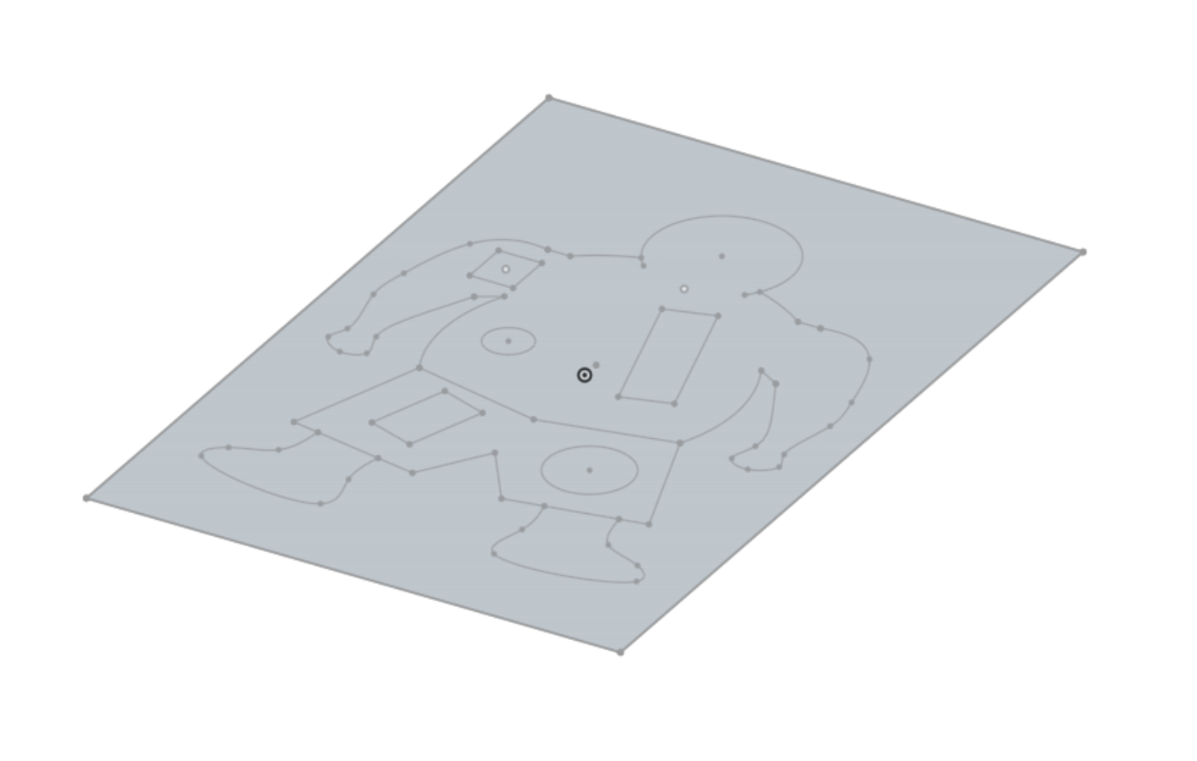
Recreated the classic game 'Operation' using multiple 80/20 Aluminum bars and stepper motors to created x, y, and z motion. The z-axis used a magnet and custom 3D printed parts rather than tweezers, and was controlled via a joystick.